Dagu Wild Thumper 6WD Chassis
Some thoughts on the only articulated 6WD chassis currently doing inspection work.
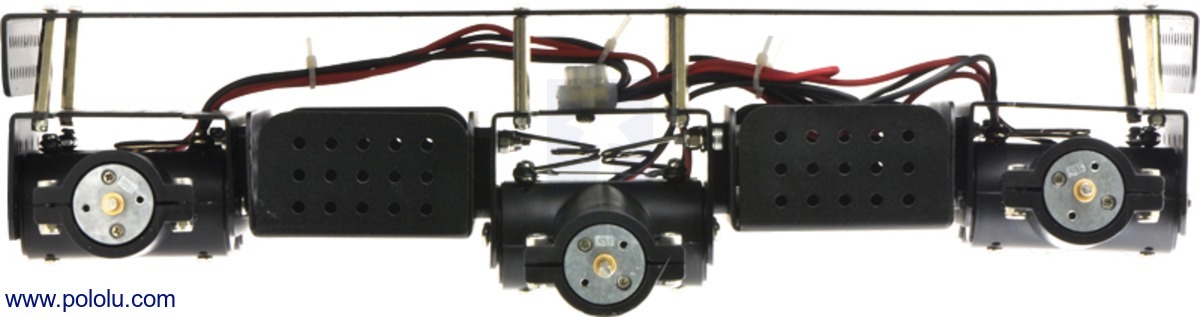
The Dagu Wild Thumper 6WD is a hybrid of “box bots”, and off road rovers. It is a modular machine assembled from three drive modules, and two equipment bays. Each drive module houses a pair of semi-independent suspension motor drive assemblies, linked by spring and wire such that they influence each other under flex, but are not firmly connected. The center module locates the wheels a little bit higher than the end modules. This is advertised as a way to reduce loads on those wheels when crossing obstacles.
Each wheel is driven by its own open can motor, placed within the stem of a T-shaped tube laying horizontally. These motor mounts pivot up and down, working with the spring sandwiched between left and right motor housings. Open motor cans are designed to allow air cooling.
Steering is accomplished by varying the speed of the wheels on each side. Each set of three wheels works independent of the other. This is the same method of directional control utilized by tanks. It enables “zero turn” steering or, “spin on a dime”.
There is no motor controller included in the basic $300 kit at pololu.com. The controller is an add on at $46. R/C interface is extra. I didn’t look that one up.
Its internal equipment bays appear to be sufficient when combined with the space beneath the upper deck, and the tops of the bays. The metal used for all bays and deckwork is drilled throughout to allow for fixing components in and on the machine with common hardware.
Video of the machine shows it climbing stairs and crossing rough terrain reasonably well. On the surface, it appears to be a better implementation of tank hull design than the alumibox inspection rovers commonly for sale. There is somewhat more tolerance for obstacles that get lodged beneath its hull.
On close study, I decided on a thumbs down for several reasons.
Height.
The machine’s configuration limits how low it can operate and still carry a usable pan /tilt camera setup. With the deck inverted, some height is cropped, but the equipment bays then become the main hardware installation points, with the batteries taking up one of them entirely.
Material.
The hull and deck are metal. Metal can interfere with video signals through what is called multipath signal reflection, the effect produce by signals bouncing off objects. Each reflection of the signal produces harmonics, and a directional change in polarization. Without well tuned and matched polarized antennas, there is quite a bit of opportunity for scramble on the video feed. Positioning the transmitter antenna on top of the hull is almost a necessity. Here, it can get hung up on the random and unpredictable presence of cables, wires, netting, etc found in a crawlspace.
The metal construction can also work with ductwork and other materials in the space to amplify multipath interference, which is generally dealt with by using higher powered VTx units. Running a VTx above 400ma can, in itself, create some nasty echoes. These are inherent problems with the 5.8GHz spectrum due to its short wavelength. Multipath is always an issue. Efforts to reduce that to an acceptable degree are many.
Motors.
The motors are an unbranded type, open can, and mated to a gear reduction box, to which the wheel adapters mount. They are inserted into the T bracket in line with the wheel’s axis. This positions them much lower than the motors you find in rock crawler adaptations. Take away? They are subject to much more water and mud intrusion, and once infiltrated, I see no easy way to service them. There are six of them to protect, and all are open can for cooling purposes. Disassembly of one suffering failure or degradation requires disassembly of all, since they share the same vulnerabilities. Replacement must be through the supply chain since a functional match is required. Initially, they appear to work well. As time goes by, though, and foreign material passes through them, I expect to see one or more wheels dragging. Rock crawler chassis conversions position their single motors much higher. They are better protected, and easier to service or upgrade. There are even sealed units with feedback circuits for fine motor control. Hobbywing Fusion or Axe are great examples.
Wheels.
The wheels are affixed to the gear boxes via adapters. The adapters, as supplied, use a single grub screw to anchor to the shafts. Six single point mounting methods that rely on clamping force. Rock crawlers use locking nuts on a fine threaded axle - much more secure.
Upper surface.
The deck is smooth, except for the heads of mounting screws. But additional equipment such as cameras, lights, video transmitters and antennas, and associated mounting hardware and cables do away with that. Getting a clean implementation takes work. Getting it perfect depends on your expectations. I’ve not yet seen a clean setup.
Video recording.
Video recording quality while moving is heavily influenced by terrain. The bumpier the worse. Active suspensions working with good Electronic Image Stabilization can smooth out a lot of the bumps. This is why hulled rovers (box bots) have such horrible moving video quality. This issue also makes watching the feed while navigating problematic. The on screen image bounces around and makes identifying some conditions in the crawlspace difficult due to the jitters. Even EIS can’t account for that. The Wild Thumper’s suspension reduces these problems a lot. What you get is something in the middle. Here is where six wheels, mounted on A arms with short throw, can do better than a rigid setup, but still lacks the smoothness of traditional live axle rigs sporting chassis-mounted cameras.
Edit: To add pics.